发布日期:2015-06-30 12:00:00
一、根据TRIZ理论最终理想解的确定:
1、设计的目的:设计一款拥有良好越障能力,同时拥有较高工作效率的机器人
2、理想解:该机器人适应各种地形,高效完成预定工作。
3、达到理想解的障碍:没有一种行进方式能够在满足越障能力强的同时,又满足行进速度快,效率高。例如,履带式机器人越障能力强,但是行进速度慢,效率低;轮式机器人行进速度快,效率高,行动灵活,但越障能力弱。
4、出现这种障碍的结果:一种行进方式无法同时达到越障能力和工作效率两方面的要求
5、不出现这种障碍的结果:要求机器人越障能力高时,机器人以履带式行进;要求机器人工作效率高时,以轮式行进
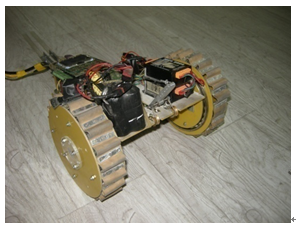
解决方案:设计一款同时拥有轮式和履带式行进方式的机器人
二、设计发明该机器人时应用了TRIZ理论的核心思想:
技术系统发展的理想状态是用尽量少的资源实现尽量多的功能。
该机器人同时拥有轮式和履带式行进方式,相当于同时拥有两种机器人的功能,既具有各自的优点,又弥补了相对的不足。
三、设计过程中应用到的技术系统进化法则有:
1、完备性法则
任何产品的创新与进化都在遵循着一定的规律,而要实现其功能,一个完整的技术系统必须包含以下4个部分:动力装置、传输装置、执行装置、控制装置,它们最终的目标是使产品能够达到最理想的功能与状态。该机器人遵从这一法则,动力装置是锂电池,传输装置是轴,执行装置是车轮、履带,控制装置以ATmega64为控制芯片,搭建控制电路。
2提高理想度法则
这一法则规定技术系统应当沿着提高理想度的方向进化,贯穿其整个寿命的始终,趋向更加简单、可靠、有效,它是八大技术系统进化法则的首要法则。该机器人遵从这一法则,将原本两种机器人拥有的功能整合到一台机器人,提高了实现功能的能力。
四、在设计发明过程中运用到的TRIZ理论发明原理有:
1、组合、合并原理与多用性原理的应用(应用部位:主轴电机)
由于机器人体积空间的限制,使撑开杆的传动轴无法找到一个理想的位置,根据组合,合并原理和多用性原理,在空间上把相同或相近的物体或操作加以组合,一个物体执行多种不同功能,从而不需要其他物体。因此,将主轴电机进行巧妙的设计,使其同时兼备传动轴的功能。
2、嵌套/套叠与中介物原理的应用(应用部位:撑开杆)
传统的轮子无法实现轮履变换,因此,根据嵌套/套叠原理,一个物体通过另一个物体的空腔,将机器人的轮子进行设计,机器人有两个主动轮,每个主动轮又由内外轮组成,内外轮之间放置撑开杆机构。可伸缩履带附在内外轮上,进行轮履变换时,藏在内外轮之间的撑开杆机构撑开,行进方式切换为履带式。
要实现轮履变换,必然需要一定机械结构来实现,根据"中介"原理,将内外轮之间设置了撑开杆,以实现轮履切换。
3、预先反作用原理的应用(应用部位:履带预紧力)
要实现履带式行进方式,必须将附在内外轮上的变形履带撑开,但是为防止掉带,同时为实现更好的将主动轮的力传送给履带,所以应用预先反作用原理,预先给履带施加预紧力。
4、动态原则的应用(应用情况:轮履切换)
该机器人设计的理想目标是使机器人能够具有较好的越障能力,并且效率较高。因此根据TRIZ理论的动态原则:物体(或外部介质)的特性的变化应当在每一工作阶段都是最佳的,对机器人的行进方式切换有以下要求:当地面情况复杂或者有障碍物时,机器人以履带式行进,越障能力强;当地面情况较好时,以轮式行进,速度快,效率高。

 TRIZ杯大赛
TRIZ杯大赛 
